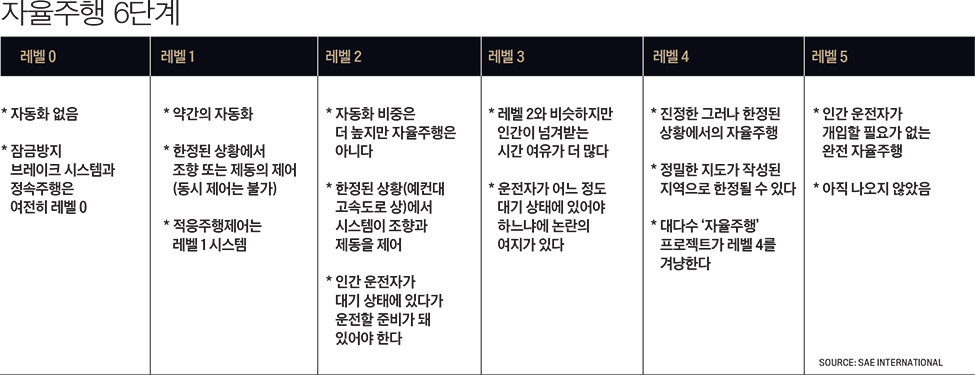
차량 자동화 수준의 0단계부터 어떤 상황에서든 숙련된 운전자만큼 주행이 가능한 5단계까지 6개 레벨을 소개한다 사진:GETTY IMAGES BANK자율주행 시스템에서 말하는 ‘레벨 4’나 ‘레벨 5’는 무슨 의미일까? 레벨은 무엇이고 어떤 시스템이 어떤 레벨인지 누가 결정할까? 이들 ‘레벨’은 자동차 전문 엔지니어 협회인 SAE 인터내셔널(이하 SAE)이 정한 프레임워크에서 비롯됐다. 특정 시스템의 차량 주행 자동화 수준이 어느 정도까지 진전됐는지를 설명하는 기준이다. SAE의 프레임워크는 규제당국·엔지니어·자동차제조사 그리고 투자자에게 널리 채택됐다.
SAE의 프레임워크는 차량 자동화 수준을 제로 자동화(구식 차량)부터 완전 자동화까지 6개 레벨로 분류한다. 완전 자동화는 어떤 상황에서든 적어도 숙련된 운전자만큼 능숙하게 주행할 수 있는 시스템을 의미한다. 자율주행 분야의 기업을 주목하는 투자자에게는 각 레벨이 무엇을 의미하는지, 특정 시스템의 레벨을 누가 정하는지, 특히 단계가 상승하면서 레벨 간에 어떤 차이가 있는지의 이해가 대단히 중요하다(먼저 한 가지 비밀을 말하자면 때때로 ‘자율주행’으로 불리면서 실제로는 그렇지 않은 시스템도 있다).
이 프레임워크를 제대로 이해하기는 쉽지 않다. 자동차 엔지니어 협회라는 말에서 예상되듯이 SAE 자체적인 레벨 설명에는 전문용어가 많아 비전문가로선 이해하기가 힘들다. 그러나 쉬운 말로 풀어놓으면 이해하기 어렵지 않다. 이제부터 그 의미를 알아보자.
━
자율주행이란 무엇인가?
GM의 슈퍼 크루즈는 운전대 가장자리의 반짝이는 조명부터 경고음과 좌석 진동, 그리고 음성 메시지까지 진행한 뒤 작동을 멈춘다 / 사진:WES ALLISON-GENERAL MOTORS-AP-NEWSIS우선 ‘자율주행’ 시스템은 차량이 인간의 개입 없이 일반도로 상에서 안전하게 주행할 수 있게 하는 장치다. ‘자동화 주행(automated driving)’ ‘무운전자 차량(driverless vehicle)’ ‘셀프주행 차량(self-driving car)’ 모두 같은 기술을 가리키는 용어다. 적어도 일부 상황에서 인간 대신 차량을 운행할 수 있는 컴퓨터 ‘두뇌’와 센서다.
다음은 자율주행 시스템의 세계로 더 깊이 파고들기 전에 명심해야 할 몇 가지 핵심 포인트다.
첨단 운전자 지원, 자율주행 시스템은 카메라·레이더·라이다 등 갖가지 센서에 의존한다(라이다는 레이저 광선을 이용해 거리를 정확히 측정하는 센서). 이 같은 센서들은 차량의 컴퓨터 ‘두뇌’가 주위 환경에 대한 차량의 상대적인 위치를 파악하도록 돕는다. 통상적으로 자동화 레벨이 높아질수록 사용하는 센서의 수, ‘두뇌’에 필요한 컴퓨팅 성능, 그리고 시스템의 전반적인 비용이 모두 상승한다.
자율주행 시스템은 인공지능의 한 형태이며 일반적으로 머신러닝(컴퓨터 학습)을 통합한다. 입력되는 데이터가 늘어날수록 그에 따라 스스로 수정하면서 기능을 개선해 나가는 알고리즘이다. 완전자율주행 시스템은 이곳저곳을 찾아가고 새로운 교통상황에 직면하면서 방대한 양의 데이터를 수집한다. 개별 차량의 시스템들은 통상적으로 그 데이터를 원격지의 데이터센터와 공유한다. 데이터센터는 입수한 데이터를 바탕으로 그 시스템을 이용하는 모든 차량을 업데이트한다. 플리트 러닝(fleet learning)으로 불리는 과정이다.
알아둬야 할 게 한 가지 더 있다. 특정 시스템과 관련된 주장을 평가할 때 반드시 명심해야 할 점이다. 특정 시스템의 레벨은 제조사가 부여한다. 현재로선 특정 시스템을 레벨 3나 4 또는 무엇이든 인증하는 독립적인 또는 정부 기구는 없다. 그런 기구가 생길 때까지 레벨은 제조사의 주장으로 보는 편이 안전하다. 다소 희망이 섞여 있을 수 있으니 액면 그대로 받아들이면 위험할 수 있다. 이상의 다섯 가지만 명심하고 이제 레벨을 알아보자.
━
레벨 0 | 자동화 없음
일부 자율주행 시스템은 운전자의 시선이 도로를 향하지 않을 경우 신호를 보내 주의를 환기시킨다. / 사진:ELISE AMENDOLA-AP-NEWSISSAE의 프레임워크는 자동화가 없는 레벨 0에서 출발한다. SAE가 가리키는 이른바 ‘다이내믹 주행 과업’을 인간 운전자가 100% 담당한다. 차량을 실제 지속적으로 운행하는 작업을 의미한다(이 글을 읽는 동안 ‘지속적’이라는 단어를 잘 기억해두자. 자동화에 관한 SAE의 정의에서 핵심 요소다).
레벨 0는 이해하기가 그렇게 어렵지 않지만 여기에도 약간의 뉘앙스가 있다. 필시 가장 중요한 점은 요즘 나온 차량 중 운전자 지원 기능을 갖추고도 여전히 레벨 0로 분류되는 자동차가 많다는 사실이다.
예컨대 잠김 방지 브레이크 시스템(ABS)은 자동화로 간주되지 않는다. 여전히 사람이 브레이크 페달을 밟아야 하기 때문이다. 순간적인 과업을 자동화하는 시스템(예컨대 일부 신차에 설치되는 자동비상제동장치 등)은 자율주행에선 자동화로 간주되지 않는다. ‘다이내믹 주행 과업’을 지속적으로 자동화하지 않기 때문이다. 결론적으로 할아버지의 구형 뷰익은 분명 레벨 0 차량이지만 흔히 알려진 ‘운전자 지원’ 기능을 갖춘 요즘 차량 상당수도 같은 레벨이다.
━
레벨 1 | 인간 운전자에 대한 약간의 지원
아우디는 2019년 A8 세단에 ‘트래픽 잼 파일럿’이라는 레벨 3 시스템을 탑재할 계획이다 / 사진:AUDI AG-AP-NEWSISSAE는 지속적으로 그러나 제한적인 특정 상황에서만 조향(steering)과 가속·제동을 제어하는 시스템을 레벨 1로 정의한다.
이는 무슨 의미일까? 다음 소개하는 사례에는 널리 보급된 기술이 채택됐다. 기본적인 초보 운전자용 모델 말고는 근년 들어 출고된 대다수 차량에는 정속 주행 장치(cruise-control system)가 달렸다. 거의 모두가 사용해 봤겠지만 원리는 간단하다. 원하는 속도로 가속한 뒤 정속 주행 장치를 켜면 가속 페달에서 발을 뗀 뒤에도 오르막에서든 내리막에서든 시스템이 차량 속도를 그대로 유지한다.
이 시스템은 SAE 프레임워크에선 ‘자동화’로 간주되지 않는다. 주행 작업의 다이내믹한 부분이 자동화되지 않았기 때문이다. 앞차가 더 천천히 달릴 경우 여전히 사람이 브레이크를 밟을(그리고 시스템을 중단시킬) 준비가 돼 있어야 한다.
근년 들어 자동차 제조사들은 이른바 적응주행제어(adaptive cruise control)라는 더 첨단 정속주행 시스템을 제공하기 시작했다. 적응주행제어 시스템은 더 똑똑하다. 레이더를 이용해 앞차와 안전거리를 유지한다. 앞차가 속도를 늦출 경우 시스템도 자동으로 차속을 줄여 안전 거리를 유지한다.
적응주행제어의 경우 다이내믹 주행 과업의 한 부분(가속·제동 제어)이 자동화된다. 물론 특정 상황에서만, 다시 말해 고속도로 주행 중 시스템을 켤 때만 자동화된다. 하지만 그것만으로도 적응주행제어 시스템을 레벨 1으로 승격하기에 충분하다.
━
레벨 2 | 조향과 제동의 제한적인 지원
지난 5월 말 자율주행시스템 오토파일럿 모드로 주행하던 테슬라 세단이 주차된 경찰차를 들이받았다. / 사진:LAGUNA BEACH POLICE DEPARTMENT-AP-NEWSIS레벨 2는 ‘부분 자동화’다. 조향 그리고 가속·제동 제어를 제공하는 운전자 지원 시스템을 가리킨다. 그러나 이번에도 적용되는 상황이 제한적이다. 인간 운전자가 수시로 개입해야 한다면(예컨대 차가 고속도로에서 진출할 때) 필시 레벨 2 시스템이다. 무엇보다 차량이 어느 정도 스스로 주행하는 듯하더라도 ‘자율주행’은 아니라는 점이 중요하다.
그런 점에서 레벨 2는 이해하기가 약간 까다로울 수 있다. 더 자세히 살펴보자. 레벨 2가 때때로 자율주행처럼 보일 수 있지만 테슬라의 오토파일럿과 제너럴모터스(GM)의 슈퍼 크루즈는 자율주행 시스템이 아니다. 두 시스템 모두 많은(그러나 모두는 아닌) 상황에서 가속·제동·조종할 수 있고 분명 ‘자율주행’ 같은 듯한 느낌을 줄 수 있다. 그러나 GM과 (대체로) 테슬라가 현재 상태에서 완전 자율주행 시스템이라는 표현에 극히 조심스러운 태도를 보이는 데는 이유가 있다. 둘 다 인간 운전자가 대기 상태에 있다가 극히 짧은 시간에 (거의 즉시) 주행 작업을 넘겨받을 준비가 돼 있어야 한다.
그것은 중요한 차이점이다. 짧은 시간에 인간 운전자의 개입이 필요할 경우 그 시스템을 ‘자율주행’으로 불러선 안 된다. 첨단운전자지원시스템(ADAS)이란 표현이 더 적합하다. 지나치게 기준이 까다로운 듯하지만 특정 시스템에 관한 기대가 실제 안전도에 영향을 미칠 수 있어 중대한 문제다. 오토파일럿 자율주행시스템 초기 버전을 탑재한 테슬라 모델 S가 2016년 5월 인명사고에 관련됐다. 도로를 가로지르는 트랙터-트레일러를 자동차의 시스템이 인지하지 못했으며 인간 운전자가 개입해 브레이크를 밟지 않은 듯했다.
그것은 자율주행에 근접한 시스템이 관련된 최초의 알려진 인명사고였다. 인간 운전자가 대기 상태에 있다가 짧은 시간에 운전대를 잡을 채비를 갖추도록 이들 시스템을 더 보완해야 한다는 점을 부각시켰다. 나아가 업계 내에 상당한 논의를 불러일으켰다. 어떻게 시스템이 인간 운전자에게 불편을 끼치지 않으면서 대기 상태를 유지하게 만들 수 있을까?
과제: 운전자를 성가시게 하지 않으면서 대기상태에 있게 하는 법
인명 사고 예방법에 관한 논의에서 불편함은 사소한 문제로 여겨질지 모른다. 그러나 너무 불편하다면 아예 그 시스템을 사용하지 않을 수도 있다는 점을 고려해야 한다. 테슬라 오토파일럿의 현재 버전은 시스템 사용 중 운전대에서 손을 떼지 않도록 운전자에게 경고한다. 운전자의 손이 운전대에 올려졌는지 감지하는 센서가 시스템에 장착돼 이행 여부를 모니터한다.
손이 운전대에 있지 않을 경우 30초 후 시스템이 조명으로 신호를 보내고 45초 뒤 경고음을 울린다. 그러고도 아무 조치 없이 1분이 지난 뒤엔 오토파일럿 시스템이 차단돼 차에 재시동을 걸 때까지 다시 작동되지 않는다. 불량 시스템은 아니지만 속이기가 쉽다는 지적도 제기됐다. 조명이 들어올 때 운전대를 살짝 누르기만 하면 경고 사이클이 초기화돼 ‘핸드 프리’로 주행할 수 있다.
GM의 슈퍼 크루즈가 세련된 솔루션을 통합했다
GM의 솔루션은 핸드 프리 주행을 허용한다. 운전대 동작을 감지하는 대신 카메라를 이용해 운전자의 머리 위치를 추적한다. 운전자의 눈이 도로를 향하지 않을 경우 시스템이 일련의 신호를 보내 운전자가 다시 도로로 주의를 돌리게 한다.
슈퍼 크루즈의 신호는 테슬라의 경고신호와 비슷하다. 운전대 가장자리의 반짝이는 조명부터 경고음과 좌석 진동, 그리고 음성 메시지까지 진행한 뒤 그 시점에서 시스템이 작동을 멈춘다. 그러나 GM은 테슬라보다 한걸음 더 나아간다. 그 시점까지도 운전자가 운전대를 잡지 않을 경우 시스템이 점차로 속도를 줄여 차를 완전히 멈춰 세우고 위험 경고 비상등을 작동하고 (GM의 온스타 시스템을 이용해) 도움을 요청한다.
GM은 또한 슈퍼 크루즈에 추가적인 안전장치를 다수 탑재했다. 안전하게 대처할 수 있는 상황에서만 사용되도록 하기 위해서다. 우선 고속도로가 아니거나 차선 표시가 명확하지 않거나 또는 운전자가 집중하지 않는다고 판단할 경우 시스템이 작동하지 않는다. 끊임없이 불편함을 유발하는 처방처럼 보일 수 있지만 모두 섬세하게 이행된다. 슈퍼 크루즈를 사용하는 데 불편함이 없다고 대다수 평가자가 입을 모은다.
‘핸드 프리’가 반드시 자율주행은 아니라는 점을 명심하자
요컨대 레벨 2 시스템은 제한적인 상황에서 핸드 프리 주행을 허용할 수 있는 첨단 운전자 지원 시스템이다. 그러나 인간 운전자가 대기 상태에 있다가 짧은 시간에 ‘다이내믹 주행 과업’을 넘겨받을 준비가 돼 있어야 한다. 그리고 우수한 시스템은 작동 중 운전자가 대기 상태를 유지하도록 조치를 취한다.
━
레벨 3 | 자율주행에 약간 더 가까워진다
오늘날 개발 중인 ‘자율주행’ 시스템은 대부분 고도로 정교한 3D 지도를 이용해 정확한 차량 위치를 차량의 ‘두뇌’에 알려준다. / 사진:YURI KAGEYAMA-AP-NEWSISSAE는 레벨 3를 ‘조건부 자동화’로 정의한다. 레벨 2와 레벨 3의 차이는 정도의 문제다. 현실적으로 운전석에 앉은 사람이 얼마나 대기상태를 유지해야 하느냐에 좌우된다. 레벨 2 시스템에선 운전자가 정신을 바짝 차리고 있어야 한다. 시스템이 대처할 수 없는 문제에 직면할 경우 곧바로 운전대를 넘겨받을 준비가 돼 있어야 한다. 레벨 3의 경우 주행이 ‘운전 설계 영역’ 내에 있는 한 시스템이 대처할 수 있을 것으로 기대된다. 인간은 ‘유사시’에 운전을 맡는 백업 역할을 한다는 의미다. 하지만 레벨 2와 레벨 3의 경계가 모호하다고 본다면 같은 생각을 가진 사람이 적지 않다.
레벨 3을 건너뛰는 자동차 제조사가 많은 이유
레벨 2와 레벨 3의 차이를 정의하고 설명할 때의 어려움은 레벨 3의 실제적인 문제에서 비롯된다. (다음에서 알게 되듯이) 레벨 4는 자율주행이지만 레벨 2 시스템은 진정한 자율주행이 아니라는 점은 이해하기 쉽고 그 차이점을 이용자에게 설명하기에도 큰 어려움이 없다. 그러나 레벨 3는 그 중간쯤에 있는 듯하다. 자율주행이면서 아닐 때도 있다.
이는 시스템 개발을 담당하는 엔지니어들에게 숙제를 던져준다. 포드 자동차의 라즈 나이르 전 글로벌 생산 책임자는 2016년의 한 프레젠테이션에서 포드의 자율주행 기술 개발 로드맵에서 레벨 3가 완전히 생략된 이유를 설명했다.
“라이다와 고화질 3D 지도 같은 기술을 추가하지 않고는 우리가 정말 우려하는 시나리오들을 안전하게 통과할 수 없음을 알게 됐다. 그런 수준에 이르면 실상 레벨 4의 솔루션이나 다름없다. 그래서 카메라·레이더 기반 기술 등을 일정 비율씩 확대하며 운전자 지원 기술을 단계적으로 밟아가는 노선에서 방향을 바꿔 레벨 4로 건너뛰기로 했다. 운전자·운전대·페달의 필요성을 없애려면 무엇이 필요한지 조사해 그런 기술 문제를 해결하는 방향을 택했다.”
쉽게 말해 포드 엔지니어들이 레벨 3 시스템 시제품 모델의 안전 기준에 부합하는 데 필요한 모든 기술을 추가했더니 사실상 레벨 4였다는 의미다. 그렇다면 굳이 레벨 3 개발 계획이 필요 있을까 하는 논리다.
그러나 일부 레벨 3 시스템이 준비 중이다
그 밖에 레벨 3에 관해 같은 결론에 도달한 자동차 제조사가 많기는 해도 전부는 아니다. 레벨 3가 슈퍼 크루즈 같은 레벨 2 시스템의 기본 콘셉트를 더 훌륭하게 구현하는 것으로 해석될 수 있다는 관점도 있다. 아우디가 바로 그런 경우다. 아우디는 내년 A8 세단에 이른바 ‘트래픽 잼 파일럿’이라는 레벨 3 시스템을 탑재할 계획이다. 그 시스템에 대한 아우디의 광고는 그들의 관점에서 레벨 2와 레벨 3의 차이를 효과적으로 포착한다. “트래픽 잼 파일럿이 작동할 때는 운전자가 차량과 도로를 계속적으로 모니터할 필요가 없다. 대기상태에 있다가 시스템이 신호를 보낼 때 운전대를 넘겨받을 수만 있으면 된다.”
아우디는 이런 시스템을 명백하게 합법화하는 법을 최근 통과시킨 독일에서 시스템을 출시할 계획이다. 하지만 미국에선 적어도 현재는 법적 책임과 규제 노출에 관한 우려 때문에 출시 계획이 없다. 그 이유를 알기는 어렵지 않다. 아우디 스스로도 경계가 여전히 불분명하다고 말한다. 아우디 시스템은 인간이 넘겨받는 시간을 레벨 2 시스템보다 좀 더 많이 주리라는 생각인 듯하다. 그래도 어쨌든 운전석에 앉은 인간이 주의를 기울이고 있어야 하지 않을까? 다행히 다음 레벨은 이해하기가 그렇게 까다롭지 않다.
━
레벨 4 | 진정한 그러나 제약이 따르는 자율주행
SAE는 레벨 4를 ‘고도의 주행 자동화’로 정의한다. 주행이 ‘운행 설계 영역’ 범위 안에 있는 한 인간의 백업이 전혀 필요 없는 시스템이다. 다시 말해 레벨 4 시스템도 한계는 있지만 그것을 벗어나지 않는 한 인간의 개입이 필요 없는 진짜 자율주행이라는 의미다.
그것이 현실적으로 의미하는 것
오늘날 개발 중인 ‘자율주행’ 시스템은 대부분 고도로 정교한 3D 지도를 이용해 차량 위치를 몇 ㎝(또는 그 이하) 범위까지 정확히 차량의 ‘두뇌’에 알려준다. 이들 시스템은 일반적으로 여러 가지 라이다 장치를 이용해 매 순간 차량의 주변 환경을 ‘지도화’한다. 그 뒤 라이다 이미지를 저장된 3D 지도와 비교한다.
개발 중인 시스템 중 일부는 차량 위치를 파악하는 일차적인 방법으로 라이다-지도 방식을 이용하는 반면 나머지는 그것을 백업으로 이용한다(완전 자율주행 시스템의 원칙 중 하나는 항공기의 자동조종 시스템과 마찬가지로 고장에 대비해 모든 중요한 하부장치에 백업이 있어야 한다).
레벨 4는 운행의 한계를 벗어나지 않는 한 진정한 자율주행 시스템이다. 운전석에 앉은 사람이 한눈을 팔든 잠을 자든 또는 아예 자리를 비우든 문제되지 않는다. 레벨 4 시스템은 의도된 한계 내에서 주행하는 한 차량을 목적지까지 안전하게 이동시킬 것이다.
진정한 레벨 4 차량이 등장하기 시작했다
레벨 4 차량이 곧 나온다. 아니, 이미 우리 눈 앞에 있다. 과거 구글 자율주행차 프로젝트로 불리던 알파벳 자회사 웨이모가 올해 초 미국 애리조나주 챈들러에서 시범적인 택시호출 서비스에 레벨 4 차량들을 배치하기 시작했다. GM은 자율주행 자회사인 GM 크루즈가 내년부터 미국 내 도시의 인구밀집 지역에 레벨 4 택시 “수천” 대를 배치할 것으로 예상된다고 밝혔다. 앞으로 수년 사이 다른 업체들도 이들을 뒤따를 것으로 보인다.
그러나 웨이모와 GM이 지역을 무작위로 선택하지 않는다는 점에 주목할 필요가 있다. 웨이모는 챈들러 지역 안팎의 도로와 교통환경에서 시제품 모델 차량을 몇 달 동안 ‘훈련’시켰다. GM 크루즈도 샌프란시스코에서 쉐보레 볼트 기반 차량을 훈련시켜왔다. 현재로선 이들 차량의 시스템이 가장 익숙한 지역에서만 운행된다. 모두 아주 치밀하게 지도화한 지역이다.
그런 한계가 이 시스템을 레벨 4로 규정 짓는다. 예컨대 지도를 얼마나 사용하든 차량이 지도에 의존한다면 지도가 없는 곳은 갈 수 없기 때문에 제한적이라는 의미다. 물론 레벨 4 시스템에는 다른 한계도 있을 수 있다. 예컨대 폭설을 감지할 경우 시스템이 작동하지 않을 수도 있다. 쉽게 말해 몇몇 제약이 따르는 완전 자율주행 시스템이라면 그 제약이 바로 레벨 4를 규정짓는 특성이다.
━
레벨 5 | 무조건적인 완전 자율주행
알파벳 자회사 웨이모는 올해 초 미국에서 시범적인 택시호출 서비스에 레벨 4 차량들을 배치하기 시작했다. / 사진:ERIC RISBERG-AP-NEWSIS레벨 5는 꿈의 단계다. 인간 운전자가 개입해야 할 필요가 없는 무조건적인 (다시 말해 제약이 없는) 자율주행이다. 달리 말해 레벨 5 시스템은 숙련된 인간 운전자가 대처할 수 있는 어떤 환경에서든 그가 갈 수 있는 어느 곳이든 완전히 단독으로 주행할 수 있다.
두 말할 필요도 없이 레벨 5 시스템은 아직 나오지 않았다. 테슬라와 BMW 등 소수 자동차 제조사가 2~3년 내에 레벨 5 시스템을 개발할 것이라고 주장했다. 그러나 설사 진정한 레벨 5의 완전 자율주행 시스템이 개발된다고 해도 여러 해가 걸릴 것이라고 보는 전문가가 많다.
네트워크에 연결된 레벨 4 차량이 다수 배치돼 지식이 축적된 결과 언젠가 레벨 5 시스템이 탄생할 수 있다. 앞서 언급한 머신러닝과 플리트 러닝을 기억하는가? 매일 운행되는 수천 대의 차량에 탑재된 시스템이 엄청난 양의 데이터를 축적하고 새로운 상황에 수없이 직면할 것이다. 이는 모두 시스템이 스스로 빠르게 발전해 나가리라는 의미다. 이런 지속적인 플리트 러닝과 치밀하게 지도화된 지역의 확대가 맞물려 가장 널리 배치된 시스템이 언젠가는 사실상 레벨 5가 될 것이다. 아직은 하나의 가능성이다.
몇몇 CEO가 야심찬 공약을 발표했지만 진정한 레벨 5 시스템은 오랜 세월이 흘러도 등장하지 않을 수도 있다. 미국 몬태나주의 눈보라, 중국 상하이의 교통정체, 그리고 숙련된 인간 운전자가 갈 수 있을 만한 어느 곳이든 안전하게 이동할 수 있는 시스템 말이다.
완전 자율주행까지 갈 길이 먼 이유
완전 자율주행은 해결하기가 극히 어려운 문제다. 웨이모는 약 10년 전인 2009년 구글 자율주행차 프로젝트로 출범하면서 이 분야에서 가장 우수하고 경험 많은 엔지니어 일부를 영입했다. 그런 웨이모도 지역의 지도를 치밀하게 작성하고 환경을 모두 파악한 챈들러 교외지역에서 몇몇 일상적인 교통상황을 안전하게 헤쳐나가는 데 여전히 어려움을 겪는다. 그렇다면 완전히 낯선 환경, 예컨대 뭄바이 도심 같은 곳을 어떻게 헤쳐나가겠는가?
애리조나주 교외 지역 출신의 유능한 인간 운전자라면 필시 스마트폰과 약간의 사전준비로도 제법 능숙하게 뭄바이를 헤쳐나갈 수 있을지 모른다. 그러나 현재로선 자율주행 시스템이 그런 능력을 보여줄 수 있게 되려면 여러 해가 걸릴 수 있다. 진정한 ‘자율주행’이 단시일 내에 실현되지는 않으리라는 의미다.
- 존 로즈비어 모틀리 풀 기자
※ [이 기사는 금융정보 사이트 모틀리풀에 먼저 실렸다.]
ⓒ이코노미스트(https://economist.co.kr) '내일을 위한 경제뉴스 이코노미스트' 무단 전재 및 재배포 금지